详解库卡机器人虚拟样机系统
库卡机器人数字化虚拟样机系统
针对于机器人设计与制造过程中的运动学、动力学分析,机器人虚拟样机系统将机器人研究与虚拟样机技术相结合。轨迹和路径规划,机器人与工作环境的相互作用等技术内容进行研究与系统开发,虚拟环境中完成机器人的设计、分析及虚拟生产过程的实现。系统的具体构成如图1
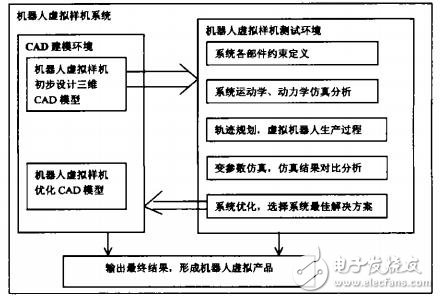
图1机器人虚拟样机系统
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
3.2库卡机器人虚拟样机系统的功能及技术特点
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
其主要功能有以下方面:库卡机器人虚拟样机系统的核心功能是提供用于在计算机上进行机器人设计与开发的虚拟环境。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
1 机器人虚拟样机系统可视化
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
而CA D几何建模是核心。机器人虚拟样机可视化环境具有以下特征:建立可视化环境是虚拟样机系统的基础工作。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
操作者可直观、高效地在此基础上进行机器人的设计与开发,计算机上实现机器人操作机的可视化环境。良好的环境可使操作者方便地将自身经验和知识随时溶人系统;
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
虚拟样机系统进一步的工作过程,从CA D模型中提取几何数据。如运动分析、动力学仿真中加以利用;
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
机器人CA D模型在结构上有所不同。样机初期的概念性设计阶段,虚拟样机开发的不同阶段。机器人CA D几何模型可能较为粗略,只为满足当前设计需要,某些详细的几何结构可不必建模;详细设计阶段,样机经过反复验证与完善,系统得到优化后的几何数据,可对样机进行详细的几何建模,形成整个虚拟样机的机器人仿真结果。

important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
2 机器人工作过程预先演示
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
包括各部分的几何结构与参数、关节数量、类型等因素,根据机器人操作机本体构成。通过对运动方程的正向和逆向求解,仿真实现机器人的运动分析。同时在运动分析过程中还可实现对机器人的运动空间分析,工作轨迹规划,碰撞、干涉校验等进行仿真研究。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
3 机器人虚拟样机动力学分析
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
如操作机材料种类、质量、转动惯量、关节摩擦等物理因素,通过在虚拟样机系统中加人物理信息。进行动力学分析。动力学分析过程中,可仿真机器人操作机实际工作情况对虚拟样机预加载荷,或施加重力作用,从而分析样机在各种工况下各部分的受力情况,研究重点环节,优化系统结构。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
4机器人控制系统仿真
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
对控制系统进行测试,库卡机器人虚拟样机可提供控制系统仿真环境。这一方面虚拟样机比物理样机具有明显优势。各种控制方法可直接作用于物理样机,高效省时,无需担心错误的控制方法造成样机的损坏。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
库卡机器人虚拟样机系统具有如下技术特点:
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
使各部分之间的仿真及分析结果及时、高效率地互相加以利用,1提供机器人仿真研究的集成系统和数字化机器人设计、验证环境机器人虚拟样机系统提供包括数字化建模、可视化的运动过程实现、运动学分析、控制系统仿真在内的统一数据平台。提供数字化的研究环境。
important; white-space: normal; cursor: text; zoom: 1; orphans: 2; font-size-adjust: none; font-stretch: normal; float: none; -webkit-text-stroke-width: 0px; overflow-wrap: break-word; background-color: rgb(255, 255, 255);">
库卡机器人虚拟样机系统能够有效溶人上一层次的数字化加工制造环境,2构成数字化虚拟制造环境的有机组成局部工业机器人是制造系统中的基本工作单元。满足虚拟制造环境中机器人工作单元上层的生产线仿真、数字化工厂要求,构成数字化机器人生产线的基础与有机组成局部。
更多详情点击库卡机器人、库卡工业机器人、库卡机器人代理
 企业资料通过认证
企业资料通过认证